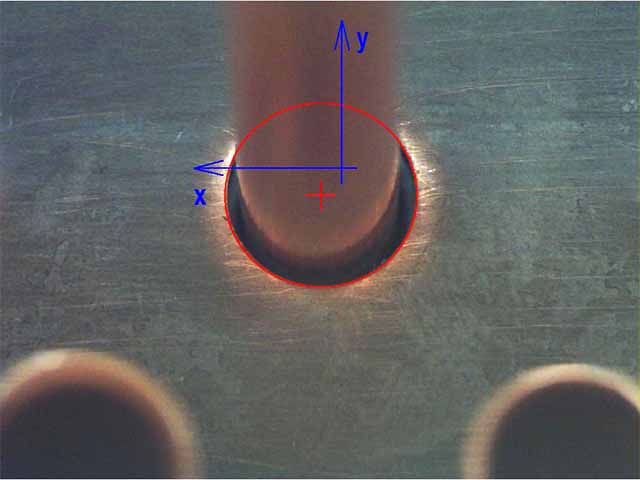
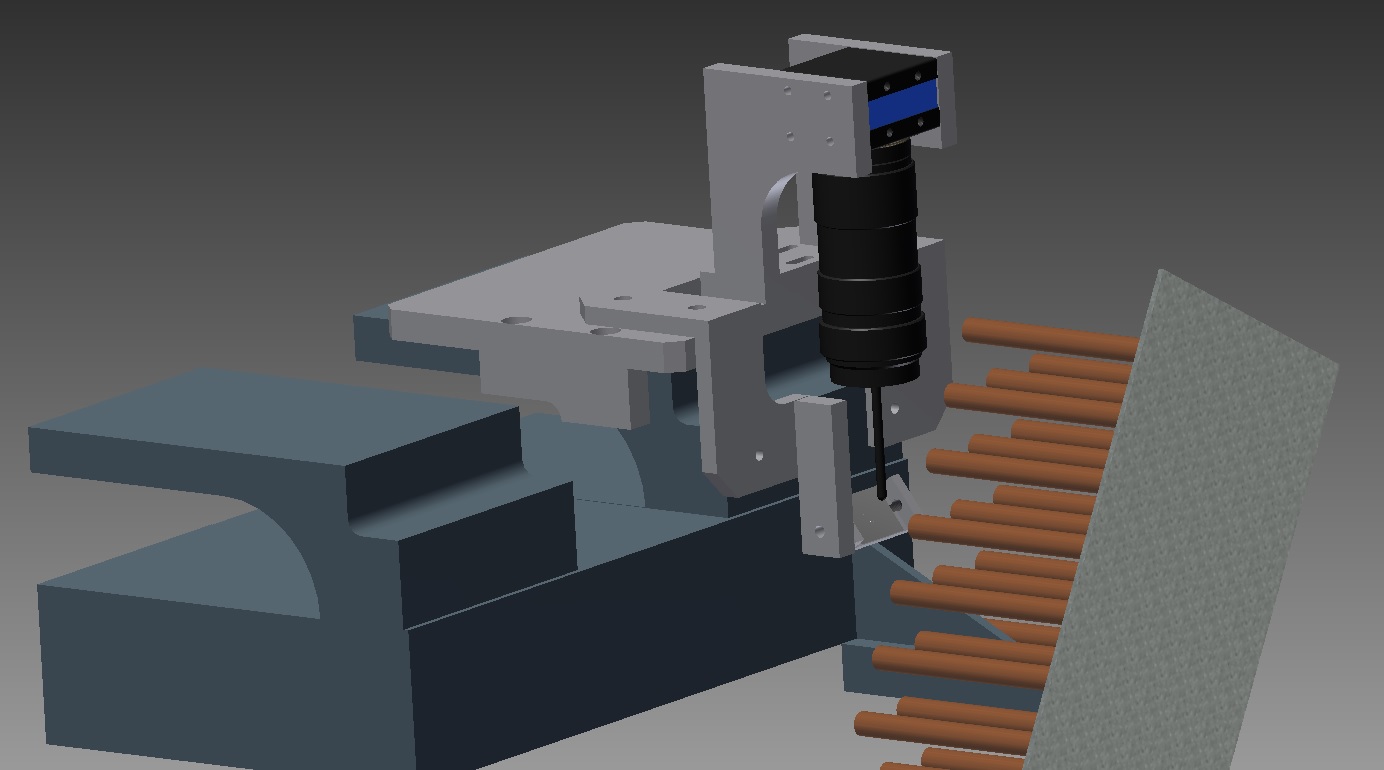
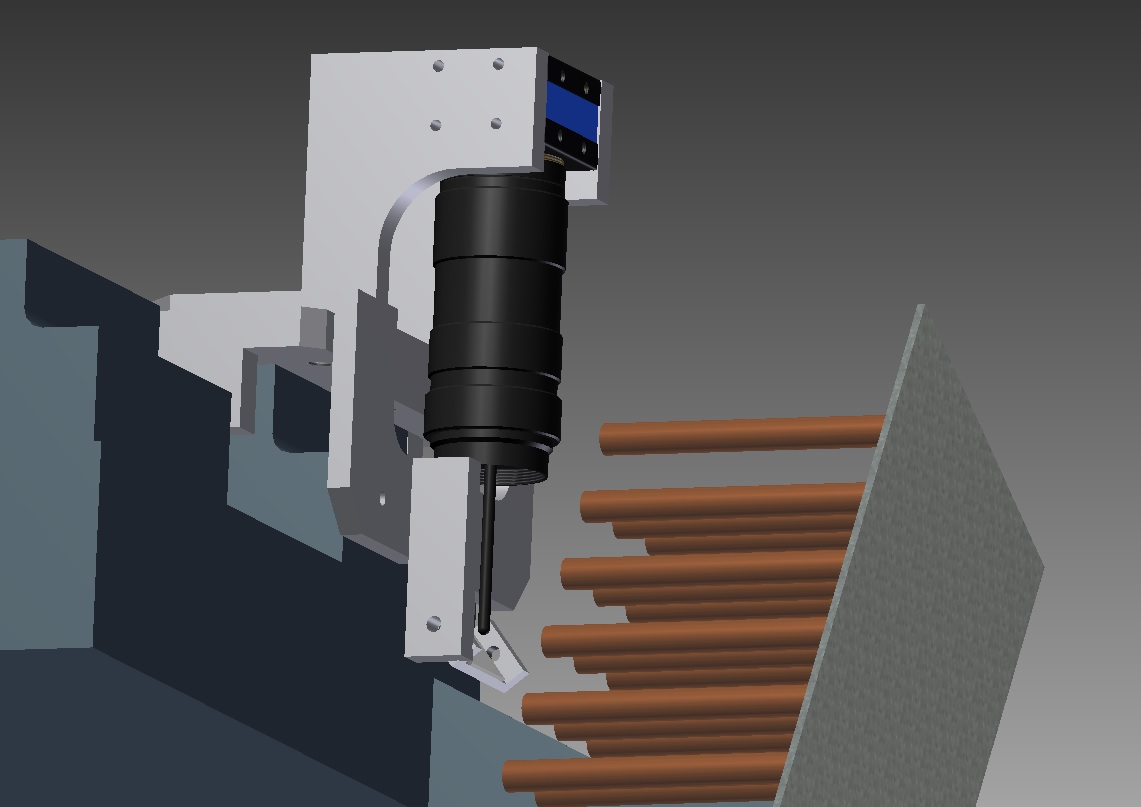
This system finds the exact position of a hole for a copper tube to pass trough. The hard part of the project was the mechanical/optical design. There is no way you can look at this hole without having the pipes block your sight. Therefor the mechanical design was fitted with first surface mirrors to bring the wanted image into the lens of camera. This way we looked throught the triple row of hairpins in each possible rotationdirection of the head of the machine.
This application was calibrated with a 10 x 10 mm calibrationplate (see gallery) and has an accuracy of 10µm.
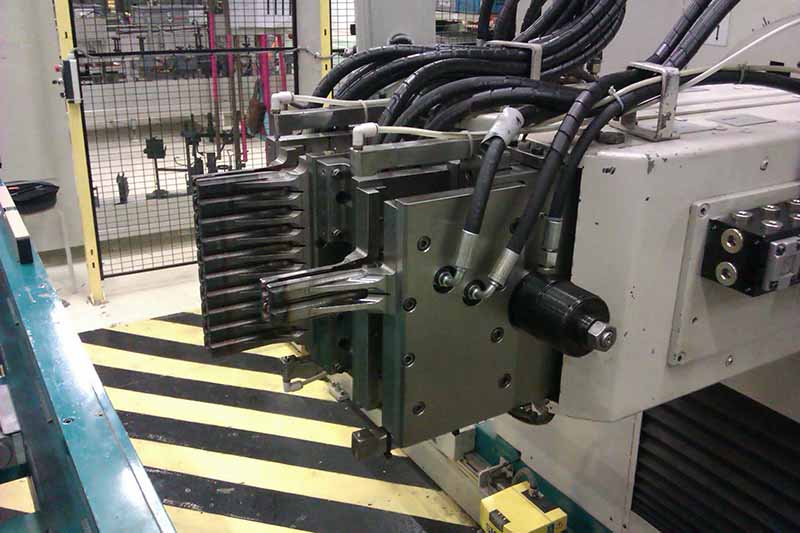
The original goal of the project was to correct the position of a robot after a coarse movement. This machine must be very precise because it 'shoots' a long bullet-shaped rod inside a long copper pipe. If the position of the bullet is not accurate enough, the bullet deflects on the pipe and damages the product and the machine.
For maintenance reasons our added mechanical mount is magnetic and self-adjusting. So even an untrained operator can remove the system for maintaining the underlaying hydraulics and put the system back on without voiding the calibration.