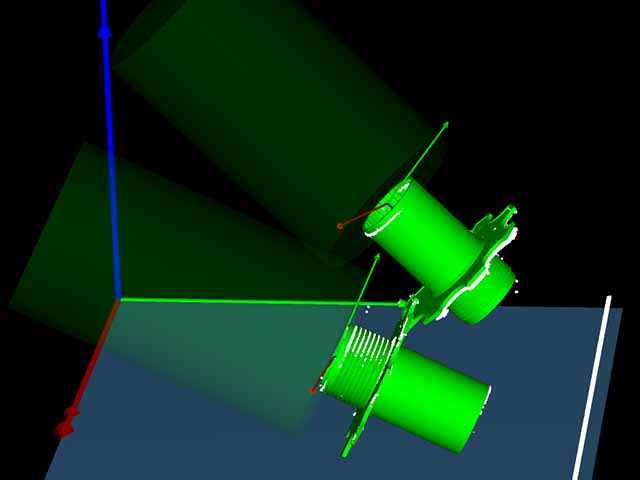
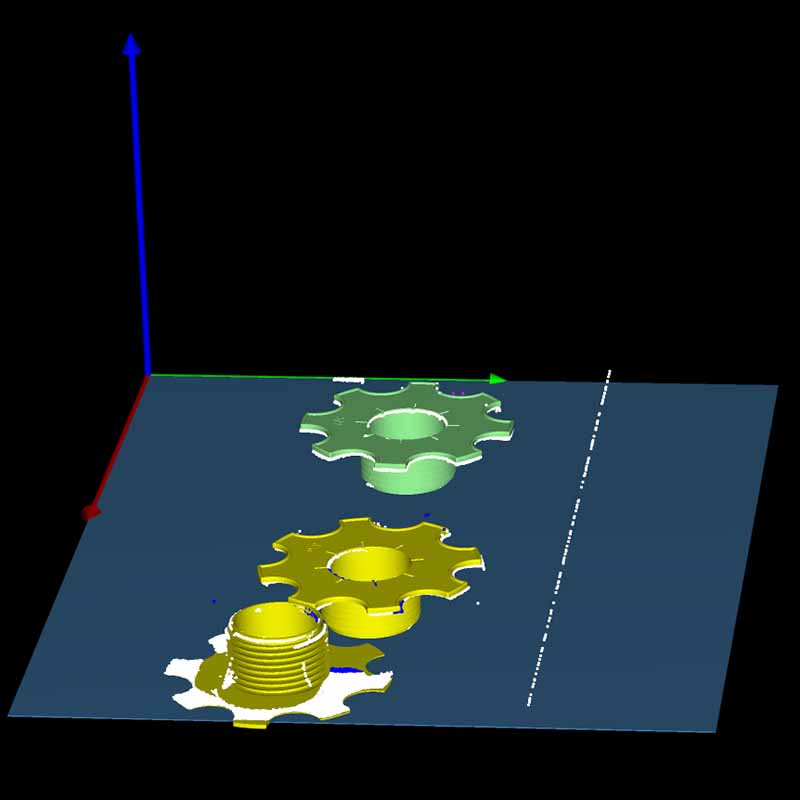
Voor dit project moesten we de exacte positie en oriëntatie van verschillende types zwarte kunststof onderdelen bepalen, zodat een robot het onderdeel kan oppakken terwijl de transportband in beweging is. Hiervoor hebben we een Sick 3D ranger camera gebruikt voor de 3D pointcloud acquisitie.
We zoeken naar de onderdelen in de pointcloud, en als ze eenmaal gevonden zijn doen we een aantal intensieve berekeningen om te bepalen of het onderdeel plukbaar is en of er een botsing zou zijn tussen de robot en de onderdelen. Omdat de onderdelen symmetrisch zijn over 45 graden, herberekenen we de pickingpositie om de voorkeur te geven aan een (snellere) picking-oriëntatie voor de robot.