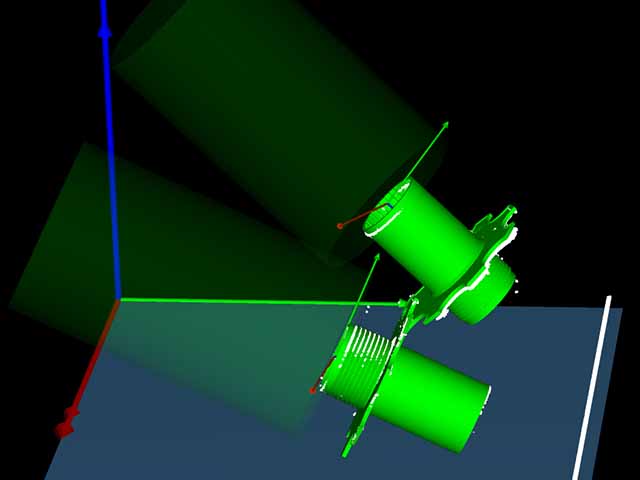
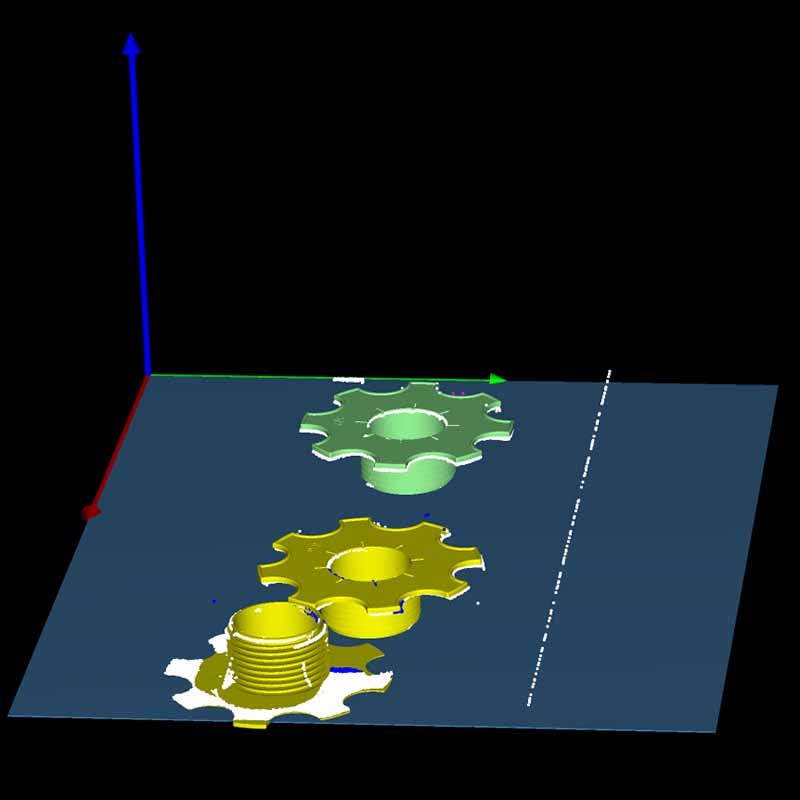
For this project, we needed to determine the exact position en orientation of several types black plastic parts to allow a robot to pick up the part while the conveyor is moving. For this, we used a Sick 3D ranger camera for the 3D pointcloud acquisition.
We search for the parts in the pointcloud, and once they are found we do some very intense calculations to determine if the part is pickable and if there would be a collision between the robot and the parts. Since the parts are symmetric over 45 degrees, we recalculate the picking pose to match a prefered (faster) picking orientation for the robot.